



空间智能与具身智能视觉感知挑战赛
| 队伍名称 | psnr分数 |
|---|---|
| AerialRecon队 | 25.1751 |
| MMobile | 24.6053 |
| 天工 | 24.5265 |
| H_H | 24.2034 |
| LRSH | 23.8935 |
| ASGO | 23.7722 |
| NewWorld | 23.6969 |
| 科大视觉系统队 | 22.9329 |
| debug | 17.4734 |
| 深空矩阵 | 17.4676 |
| 我在鳌山卫摸鱼队 | 10.8784 |
| 队伍名称 | 所获奖项 |
|---|---|
| crown_prince | 一等奖 |
| H_H | 二等奖 |
| 贝壳小队 | 二等奖 |
| IKingOne | 三等奖 |
| 识界先锋 | 三等奖 |
视觉感知是实现空间智能与具身智能的关键支撑技术,近年来在自动驾驶、智慧城市、机器人等场景中展现出广泛应用前景。特别是强化学习等技术在智能体感知与决策中的深度融合,正在成为推动该领域突破的重要力量。
 |
 |
组织者:彭君然、陈磊、唐彦嵩、刘健、许修为、尹航、孙浩文、卫浩宇、邱牧野、刘旭阳、赵鑫
指导专家:张兆翔、鲁继文、殷绪成
组织单位:北京科技大学、清华大学、中国科学院自动化研究所、北京九章云极科技有限公司、塞弗卓盈(上海)科技有限公司
赞助商及技术支持单位:北京九章云极科技有限公司
媒体支持单位:塞弗卓盈(上海)科技有限公司
联系电话:13051937326
联系邮箱:prcvcompetition@126.com
微信交流群:报名邮件回复确定
参赛者要求:
按自愿报名的原则,参赛团队和成员的组成可以为:
以个人或团队方式均可通过邮件方式报名参赛,每个参赛队伍人员不超过5人,每名参赛选手只能参加1个参赛队。每个参赛队伍在竞赛截止时间之前最多可更新2次结果,截止时间之后不能再更新结果。参赛队发送报名信息至 prcvcompetition@126.com。
邮件标题格式“空间智能与具身智能视觉感知挑战赛_(参赛队名称)”。
邮件内容应包括个人或团队基本信息、负责人基本信息、参赛人数、联系方式(手机,邮箱),所有表格中对应成员的信息均为必填项,填写后保存为excel的格式,文件命名为“空间智能与具身智能视觉感知挑战赛_(参赛队名称).xlsx”。
组织方收到邮件并与报名者确认后,报名成功。
| 参赛队名 | ||||||
| 序号 | 角色 | 姓名 | 单位 | 文化程度 | 手机号 | 邮箱 |
| 1 | 队长 | |||||
| 2 | 队员 | |||||
| 3 | 队员 | |||||
| 4 | 队员 | |||||
| 5 | 队员 | |||||
| 时间 | 具体安排 |
| 6月11日 | 组委会在网站公布比赛任务、参赛办法和评比方式。 |
| 6月12日-8月10日 | 参赛队伍报名及邮件资格确认。 |
| 7月21日-8月31日 | 比赛开始,组委会发布比赛训练集。各参赛队在规定时间内完成比赛任务,将结果按照规定的格式上传至指定位置。每个参赛队只能提交一次结果参与评测(如果需要修改,请在规定时间内联系组委会进行修改)。 |
| 9月1日-9月30日 | 评委按照规定的评测方法,验证各队程序执行结果,对结果进行评测,评比各队名次。 |
| 10月15日- 10月18日 | 在第八届中国模式识别与计算机视觉大会PRCV2025竞赛单元介绍获奖单位比赛方法,为获奖团队颁奖。 |



竞赛分设空间智能与具身智能两个赛道:
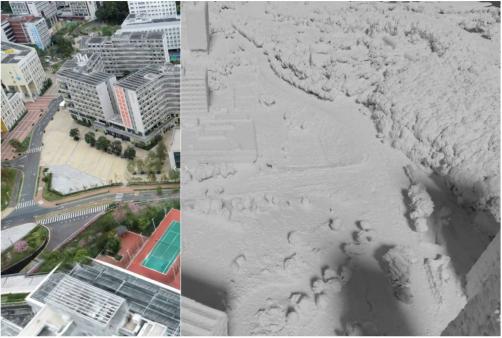
赛道1:空间智能
本任务要求构建基于多视角航拍图像的城市场景三维重建模型,具体定义为:
赛道2:具身智能
本任务在动态遮挡仿真场景中完成抓取/杂物清理任务,具体定义为:
赛道1:空间智能
评估流程为比较测试视角下的渲染质量,根据组委会提供预设的测试视角相机位姿集合,参赛模型生成指定分辨率(数据集文档中说明)的RGB渲染图。训练数据格式、评测数据格式等其他细节具体参照数据集中的readme文档。
评价指标:
最终成绩:
根据PSNR进行排名,PSNR越高的队伍排名越靠前。
赛道2:具身智能
评估流程划分为两个维度:
1. 任务完成度评估
用于评估机器人完成操作任务的精度与可靠性
评估流程:
(1) 任务设定与环境初始化
组委会提供若干标准动态遮挡场景,每个任务包含目标物体和指定目标位置。Agent初始位姿以及目标物体初始位姿将会在一定范围内随机初始化。
(2) 机器人执行
Agent自主完成感知、规划与操作,尝试完成指定目标的抓取与放置
(3) 评估数据记录
评价指标:
2. 执行效率评估
评价指标:
最终成绩:
两个维度的评价指标采用倒排得分,仅前20名计分有效,每项满分10分。
最终成绩将对三个维度的得分加权得到:0.5 x 完成度 + 0.5 x 执行效率。
竞赛每个赛道各设置(以下奖金及算力券由北京九章云极科技有限公司提供赞助):
一等奖1名(奖金6000元人民币、500度算力券)
二等奖2名(奖金各3000元人民币、200度算力券)
三等奖3名(奖金各1000元人民币、100度算力券)
优胜奖6名(奖金各500元人民币、50度算力券)
各参赛队伍根据比赛成绩均可获得由 PRCV 2025 组委会与组织单位等共同颁发的获奖证书和奖金。
China Society of Image and Graphics (CSIG)
Chinese Association for Artificial Intelligence (CAAI)
China Computer Federation (CCF)
Chinese Association of Automation (CAA)
Shanghai Jiao Tong University (SJTU)
Shanghai Feten Culture Promotion Company
AutoDL
East China Normal University

